
It’s easy to do environmental sensing at ground level. But how about up in the air over our heads? If we could somehow reach it inexpensively and safely, can we directly explore what lies above, perhaps making our own discoveries?
One of my projects for Dinacon 2019 will create a party-balloon platform for inexpensive aerial environmental sensing. Everyday balloons offer a number of advantages. They are readily available and very safe to fly. They don’t cost much or require any licensing, training or piloting skills. Balloons don’t use any fuel or batteries, yet they can stay aloft for days at a time, silently. When tethered, it’s easy to control their height and position in space and they’re quite environmentally friendly. Balloon lofting is perfect for children’s science programs, hacker workshops, citizen science research, digital naturalism, technology art, and low-cost indoor or industrial monitoring.
My initial ballooning prototype will explore a variety of sensors to see what kind of aerial data is interesting. For motion we will use an accelerometer, gyroscope and GPS unit to tell us where our sensing station is and measure how it is moving in space. We will also get airborne data on temperature, pressure and humidity since we know these vary interestingly with altitude. Many more sensors are available to be tried. UV sensing, air quality, dust levels, light, carbon dioxide, and wind are all on our list. I’ll be using Pycom’s Pysense and Pytrack shields, augmented by Grove sensors.
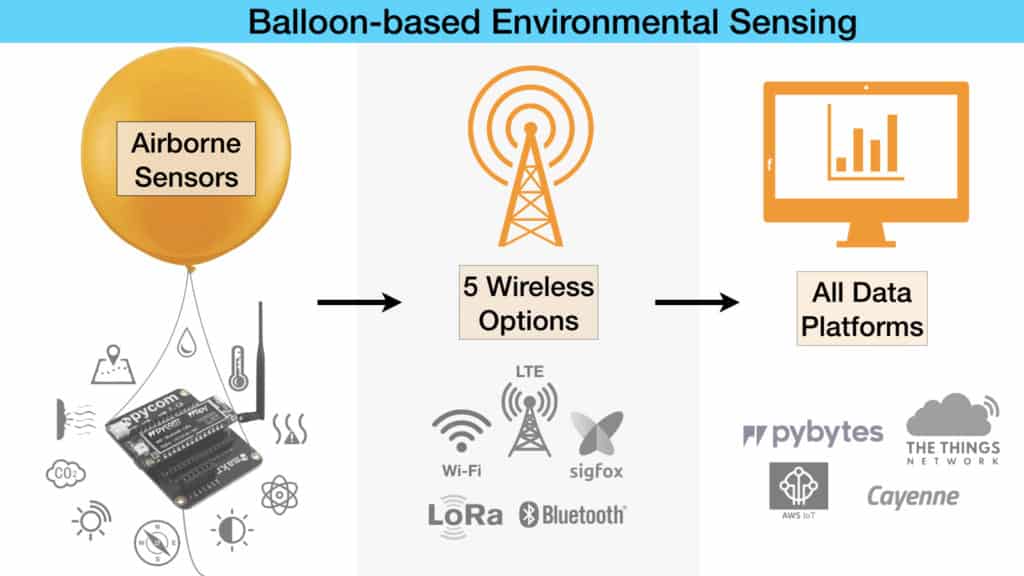
There are many platforms for obtaining and transmitting sensor data. For this project I’m experimenting with the remarkable FiPy module from Pycom. It has a ton to offer! There’s plenty of I/O to support our sensors, an ESP32 processor running my favorite MicroPython development environment, and no less than FIVE radio options, all onboard. The FiPy can communicate locally using WiFi and Bluetooth, or long-range with LoRa, SigFox and mobile LTE (Cat-M/NB-IoT). This means a single hardware platform can easily travel between different countries and environments, using the best communications method for the job at hand. So far the FiPy has been very easy to set up and use. I’ve needed to do a bit of updating the sample code for non-European frequencies and radio frameworks. With those set, I’ve been successful in transmitting on all five protocols. There’s even a cloud platform Pybytes to manage incoming data and remotely update devices in the field. And Pybytes is just one option. The FiPy module will communicate with Things Network for LoRa, Cayenne for data display, AWS, Azure, Watson, and many other IoT platforms.
Looking forward to building this at the second annual Dinacon Digital Naturalism Conference, a month-long hackathon where biologists, technologists and artists gather in the jungle to use our skills together far from the comfort of our labs. As a node-leader for the conference I’m also planning to run a 4-in-4 fast prototyping workshop, and perhaps plant a rust garden. Those projects to be covered in upcoming posts.